
Version 8 involved learning how to print Taulman’s Bridge Nylon myself. It’s a huge pain to print, mainly because the diameter of the filament isn’t constant. But after a ton of trial and error I got some decent results. Certainly not as good as Isaak’s prints, but it’ll hopefully get the job done.
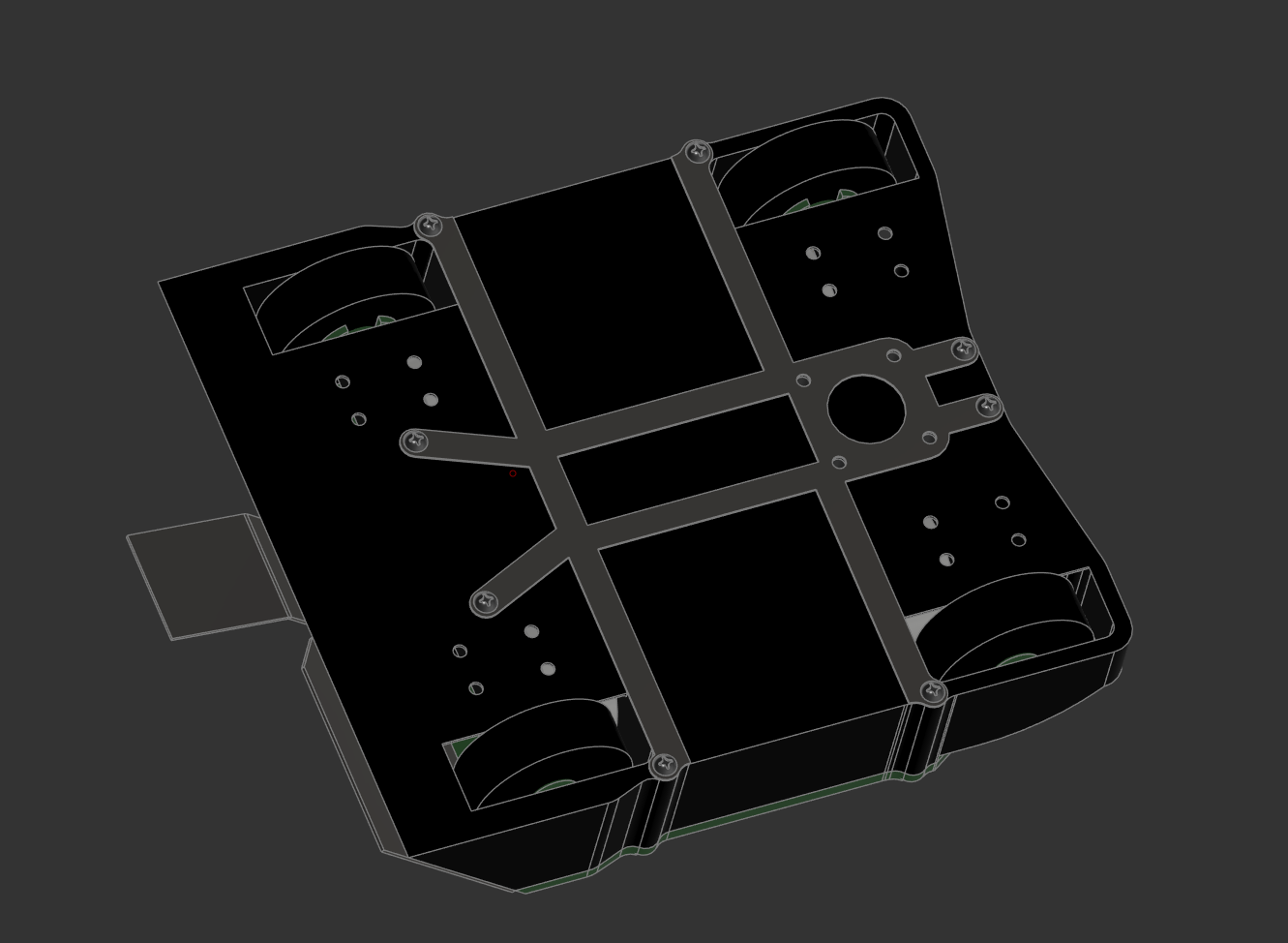
The other issue with V7 is that the robot is too floppy. To get good flips, you need the arm and the portions of the chassis it pushes off to be rigid. To help with this, I got a titanium brace to help keep things from sagging during flips.
{kind=link}
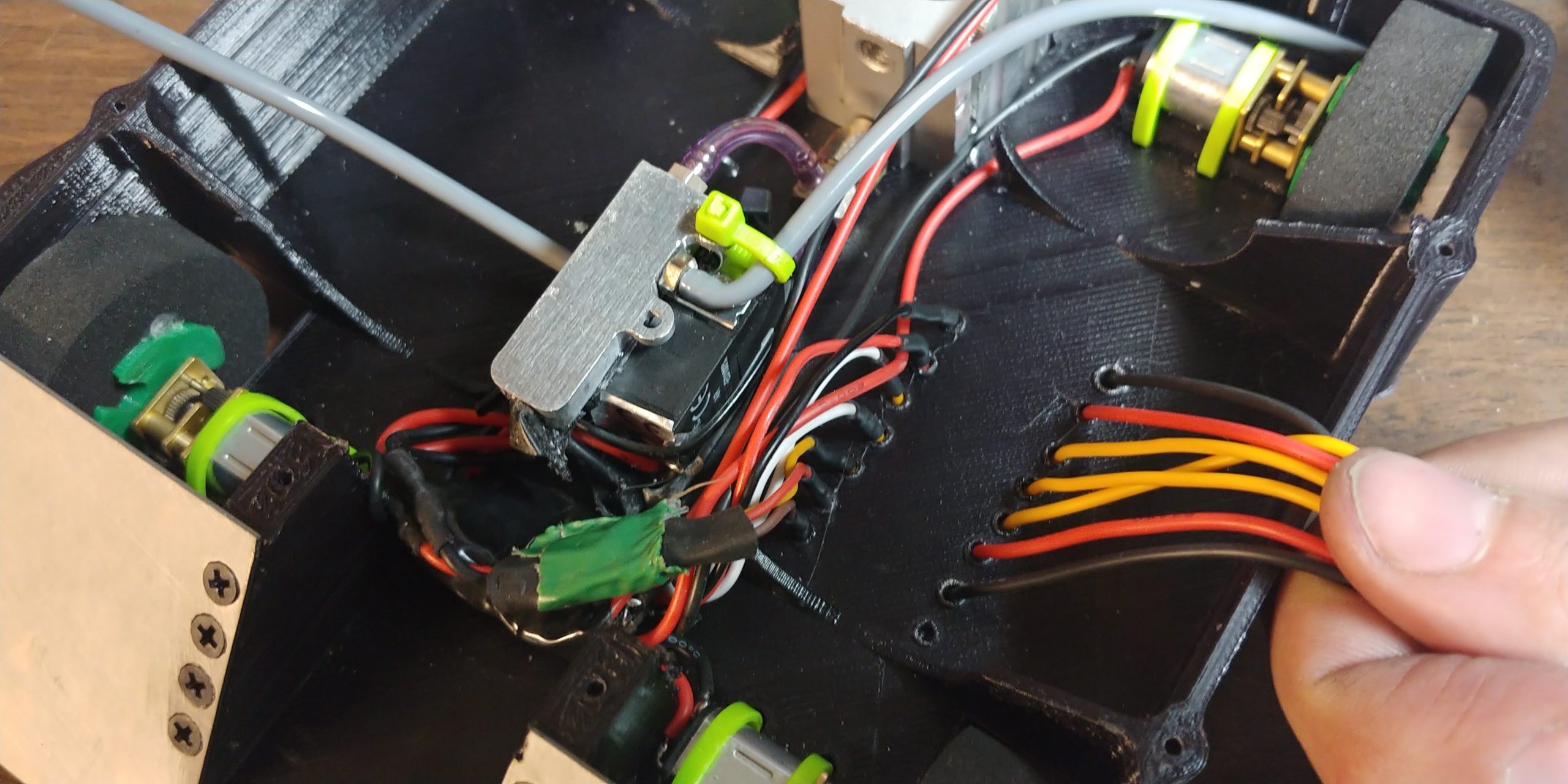
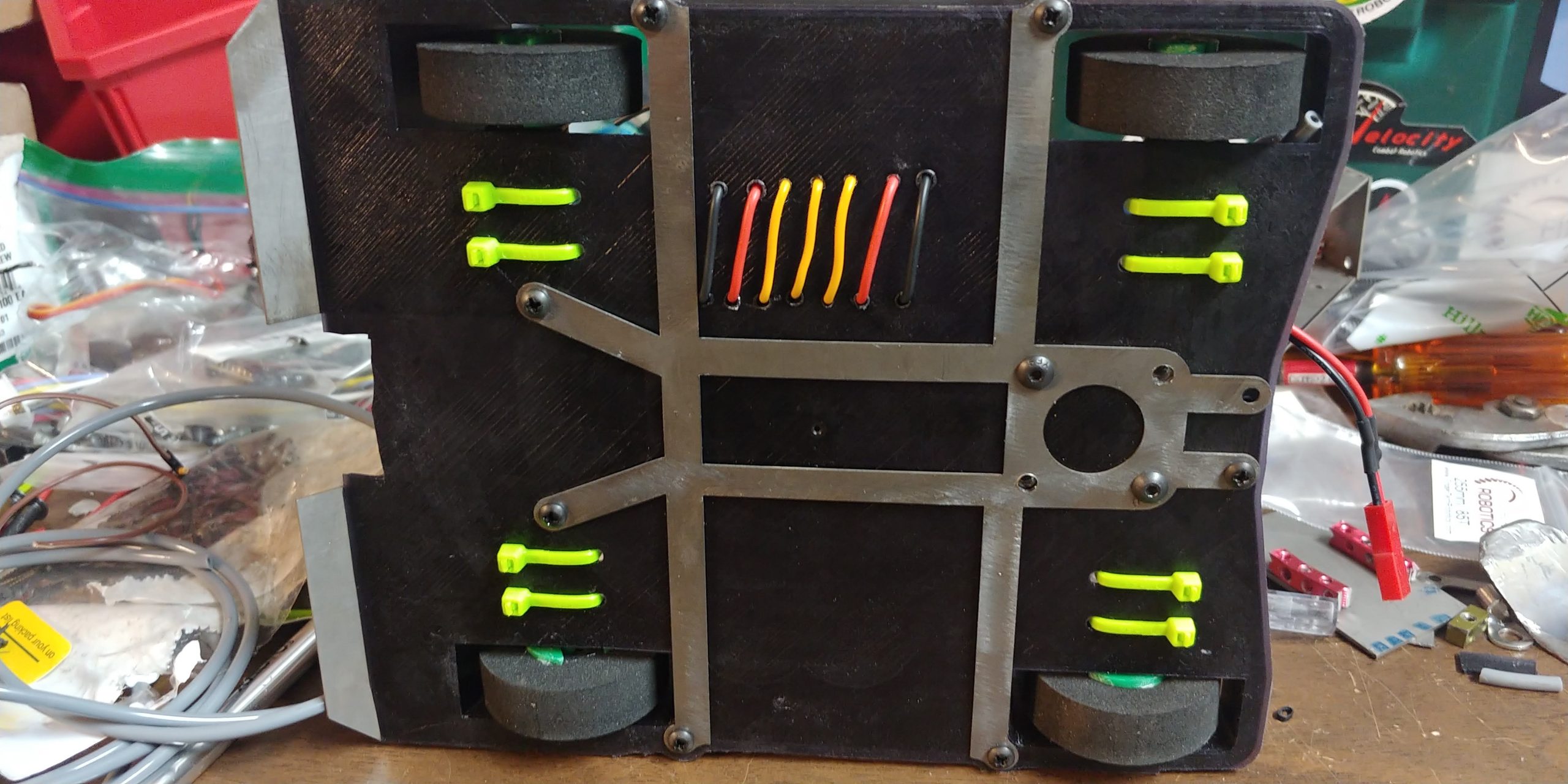
I’ve done a lot of cursed things in my build, but this might be a new low. I keep trying to make the robot smaller and smaller to save weight. While doing so, I neglected to leave a path for my receiver wires. At 3am, I made the horrible choice of using my soldering iron to quickly make a bunch of holes in the baseplate to wrap the wires around the OUTSIDE of the robot. This decision was immediately regretted after the plane ride when I finally got some sleep. On the bright side, it’s so far towards the center that it’s unlikely it’ll get it and it’s extremely funny.
{kind=link}
{kind=link}
{kind=link}
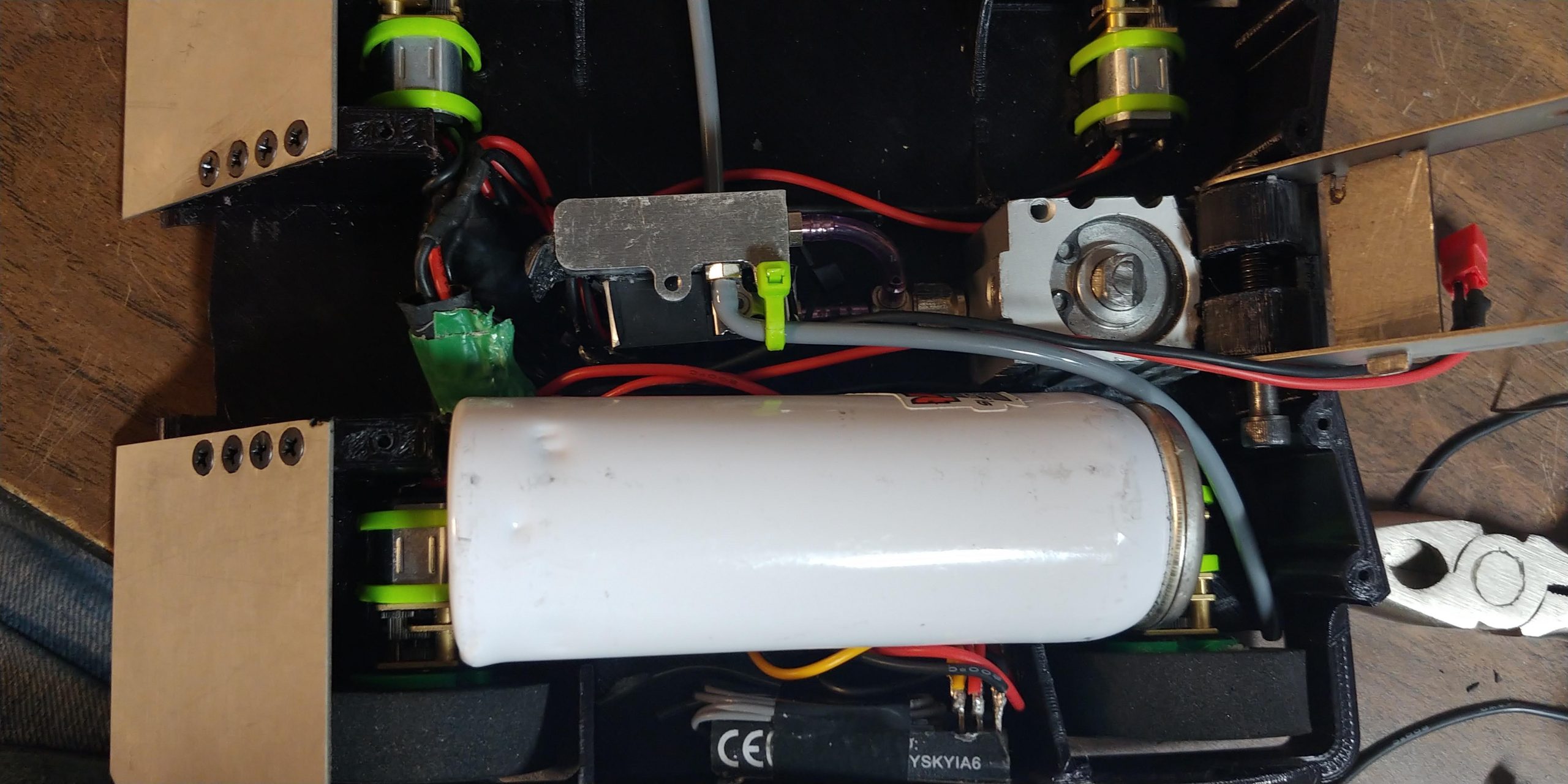
Wow the robot’s actually in weight! Time to fight!
{kind=link}
{kind=link}